| 4x4 |
| FPV Racing |
| 04.05.2014 - 20:44 |
 Projekt PFV Racing : Auf der Suche im Internet nach FPV Fliegen habe ich bei YouTube einige Videos gesehen , die mit Race Dronen gemacht worden sind. Must-have Dronen allgemein, haben mich eigentlich nicht so interessiert, Fliegen macht die Elektronik , bauen ist auch nicht viel, die meiste Zeit geht fürs lesen und Programiren drauf ? Zum Glück hat mein Sohn auch Interesse gezeigt und da habe ich dann bei Ebay dieses Set hier gekauft.  Zwei Walkera Runner 250,wobei einer nur als Ersatzteilspender fungierte, zwei Regler def. Devention Goggle V2 FPV Videobrille Set: 2xWalkera Runner 250 2xLipo 3s 2200 MAh 7xErsatzpropeller Devo 7 Sender Devention goggle V2 Videobrille 2xLipo-Lader Div.Kleinteile   der erste fliegt schon mal, ich werde noch , wenn ich Zeit habe genau beschreiben, wo die Schwierigkeiten usw, waren. Bei den Walkera Fans bekommt man alles was man braucht……………. http://walkera-fans.de   wir haben mal provisorisch eine Cam angebaut , bös wackelig aber das erste Video ist gemacht. 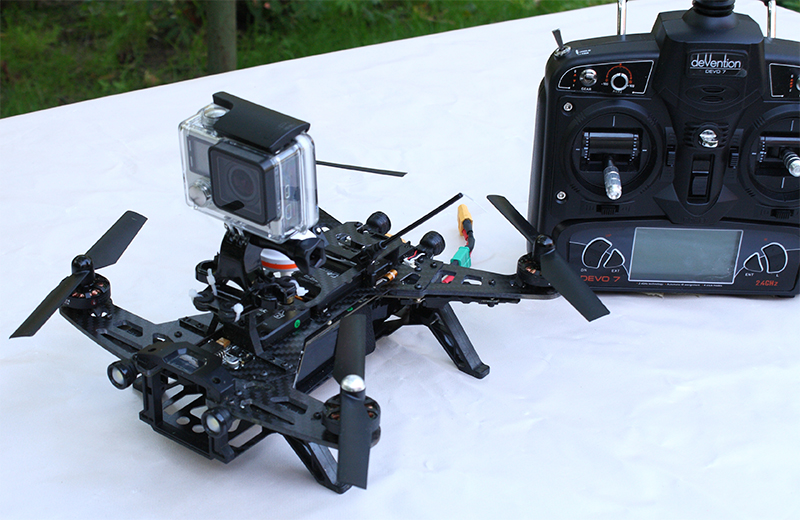  Beim zweiten haben wir zwei neue Regler verbaut , dann wollte ich den Walkera Runner an meiner neuen Spektrum DX9 binden, hat aber nicht geklappt, also erst mal den Spektrum AR9020 DSMX Plus -9- Kanal Empfänger + 2x Satellit ,der bei der Black Edition dabei war eingebaut. Und er fliegt auch,.......... auch hier später mehr………………………………  Da wir jedes Bauteil überprüfen mussten, hat man auch gescheckt, wie so ein Gerät überhabt funktioniert und wie und was verbaut ist. Brushless Motor ,Regler kennt man, hier sind es 4 Brushless Motoren mit 4 Brushless Regler. Brushless Regler, Runner 250-Z-16 Brushless Regler (CW),Runner 250-Z-17 Brushless Regler (CCW) Motoren, Walkera Runner 250 Spare Parts Brushless Motor CW/CCW(WK-WS-28-014) 2500KV Empfänger, Runner 250-Z-18 DEVO-RX710 2.4G Receiver Flugkontroller , Walkera Runner 250 Spare Parts Flight Controller Main Control Board Runner 250-Z-19 FPV Sender, Runner 250-Z-20 TX5816(FCC) 5.8G 4CH Transmitter Antenne, Walkera Runner 250 Spare Parts 5.8G Mushroom Antenna Runner 250-Z-28 Camera, Walkera Runner 250-Z-24 FPV PAL 800TVL HD Camera for Walkera Runner Platine( Board), Walkera Runner 250 Power Board Parts Runner 250-Z-23 Das sind die Elektronischen Bauteile des Walkera Runner 250, der neue Walkera Runner 250 Advanced GPS Version, hat nun auch GPS.  Da man mal wieder viel im Internet unterwegs ist und man so nach und nach sieht, was die Quadrocopter so alles können und wie viel Technik man da verbauen kann, haben wir uns entschlossen selbst einen zu bauen . Projekt Quadrocopter : Frame Cad Zeichnung, man bekommt Zeichnungen in den so bekanten Foren, selbst Zeichnen und fräsen lohnt sich wohl nicht, man bekommt sehr gute Frames ab 25 Euro. 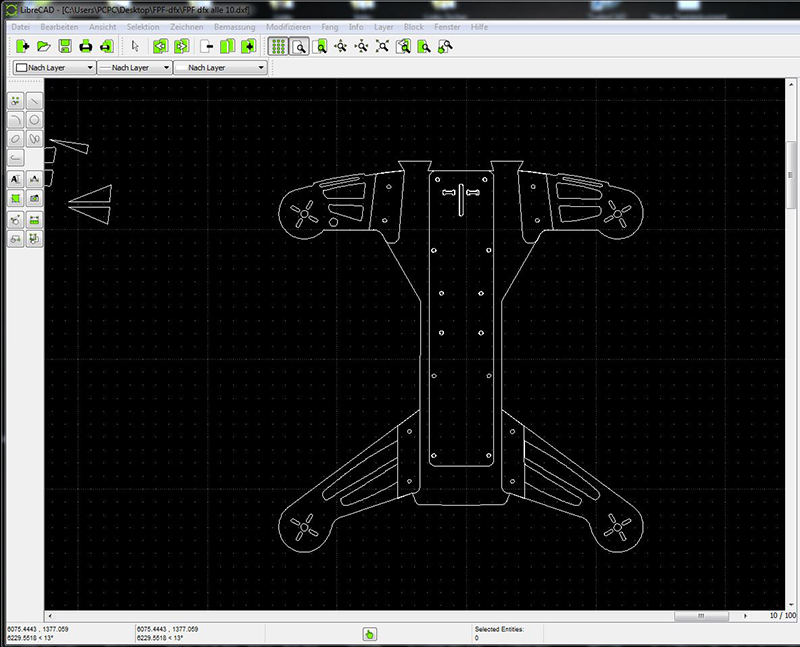 Ich hatte mal eine Zeichnung gemacht, aber ob ich die fräsen werde, mal sehn ……………… HK Predator 650 : Wenn man solche Videos sieht, dann Must-have Das Frame Kit haben wir, sind viele schöne Carbon Teile, die Schrauben werden durch hochwertigere ersetzt und mit Loctite gesichert . Schrauben sind bestellt ………… Verbaut wird, In Planung : Erst mal soll er fliegen Motoren ? Regler ? Flugregler : APM V2,8 ? Features : APM V2,8 - Arduino Compatible - Includes 3-axis gyro, accelerometer and magnetometer, along with a high-performance barometer - Onboard 4 MegaByte Dataflash chip for automatic datalogging - Optional off-board GPS, uBlox LEA-6H module with Compass. - One of the first open source autopilot systems to use Invensense's 6 DoF Accelerometer/Gyro MPU-6000. - Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties. - Atmel's ATMEGA2560 and ATMEGA32U-2 chips for processing and usb functions respectively. später 3 Axis Brushless Gimbal +Controller für GoPro 4 Hab ihn jetzt doch schon mit den original Schrauben zusammen gebaut. Bauzeit , einen Sonntagnachmittag.  Die M2 Inbusschrauben sind ok, aber die M2 Linsenkopfschrauben gnabeln schon beim leichten festziehen über. Die Carbon Teile sind sehr passgenau , eben CNC gefräst, die Konstruktion ist wie ich finde der Hammer, mit den Cabon Rohren ist er sehr leicht und richtig verwindungsfest. Die Motorhalter sind aus Alu ! Die M2 Linsenkopfschrauben werden jetzt ersetzt , an den Schrauben kommt man überall gut ran. 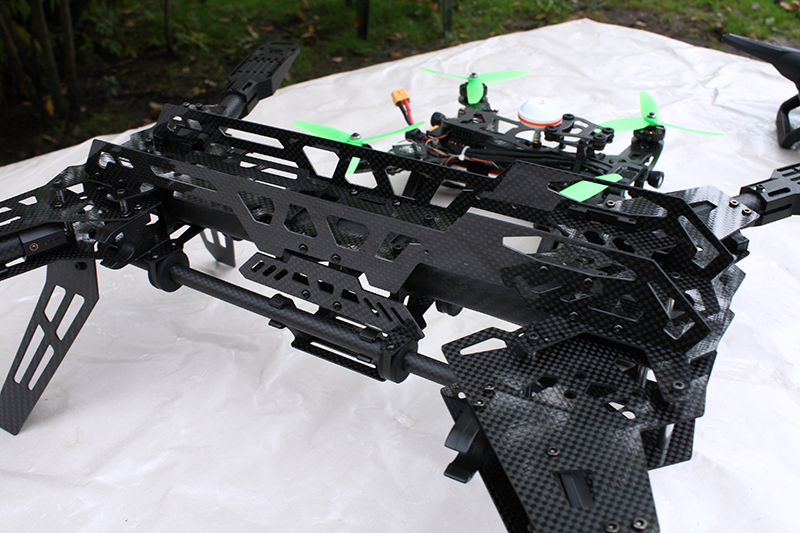 war mal wieder ein bisschen Zeit am Sonntag und die ersten Elektronik-teile und Motor sind verbaut und die Motoren laufen sogar schon. 4x Emax MT3110 Brushless Motor 480kv 4S-6S 8x ESC 100A Anschlußplatine 4x BULL TEC Brushless Regler 30A 2S - 6S (SimonK N-FET) BEC Power Module for APM 2.6 APM 2.6 Flight Controller + GPS   Nach dem Einbau müssen die Regler eingelernt werden. Regler-Gasweg-einlernen, alle 4 Motoren sind ja mit der Anschlußplatine verbunden und bekommen alle sofort Strom wenn das Akku angeklemmt wird, von jedem Regler wird der Servostecker direkt am Empfänger angeschossen und so nacheinander jeder Regler eingelernt. Hier mal ein Video über Regler einlernen ……………. APM 2.5/2.6 Simple installation and setup 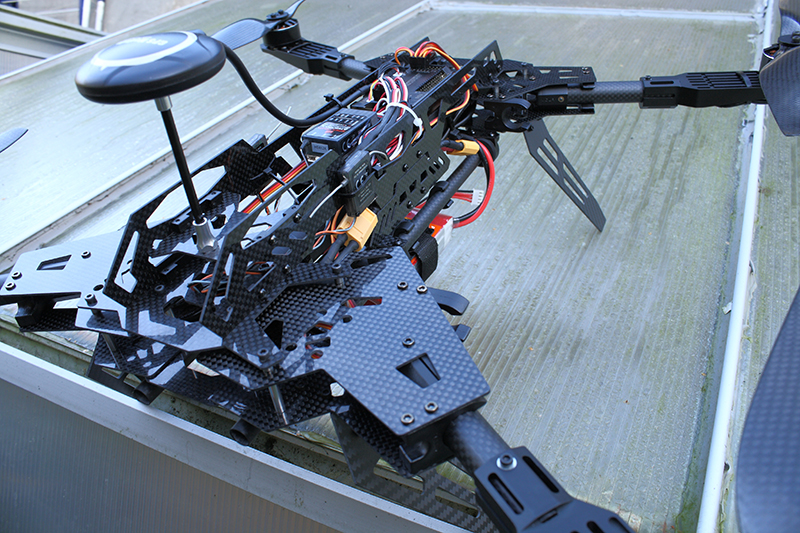 Fazit : Nach einbau……… Regler-Gasweg-einlernen Mission Planer installieren, AMP 2.6 mit USB verbinden und mit Connect verbinden. Unter Initial Setup , Install Firmware installieren , dann auswählen welche Art Copter usw alles richtig angeben und weiter. Compas, Radio Calibration , wichtig Kalibrieren !, Flight Modes, man muss mindesten erst mal Flight Modde 1 Stabilze auf einen Schalter Programmieren . Um die Motoren zu Starten , Am Sender ,Throttle runter und Rudder nach rechts Da jetzt alle zum Fliegen alle wichtigen Elektronik-teile verbaut sind und die Grundeinstellung gemacht ist ,sollte er theoretisch Fliegen. Ich werde aber erst im Mission Planer noch mal alles durchgehen und die Flight Mode von 1-6 studieren . Im APM 2.6 Controller Set, ist noch ein TTL 3DR Radio 3DRobotics Telemetry 433Mhz module (433MHz) und ein MAVLink-OSD Microcontroller mit dabei, die als nächstes verbaut und Programmiert werden. Am MAVLink-OSD Microcontroller kommt dann eine FPV Kamera mit Sender, für die FPV Brille oder FPV Monitor. er fliegt ...................... verbaut bis jetzt am HK Predator 650 4x Emax MT3110 Brushless Motor 480kv 4S-6S Carbon Propeller T-Serie 1355 13 x 5.5 4x BULL TEC Brushless Regler 30A 2S - 6S (SimonK N-FET) ESC 100A Anschlußplatine BEC Power Module for APM 2.6 APM 2.6 Flight Controller Ublox NEO-7M GPS Module w/Compass & Bracket CRIUS MAVLink-OSD V2.0&USB-TTL Modul TTL 3DR Radio 3DRobotics Telemetry 433Mhz module FPV Kamera HD 700TVL 1/3 Zoll NTSC 3.6 mm MTV FPV Sender 5,8Ghz 25mW 22 Kanäle, FT 951 5.8 GHz Zirkular Polarisierte Antenne RP-SMA TX Walkera G-2D brushless Gimbal, Gopro Hero 4 Session Gopro Hero 4 Session Gimbal Universal Haltering eBay-Artikelnummer:111823381254 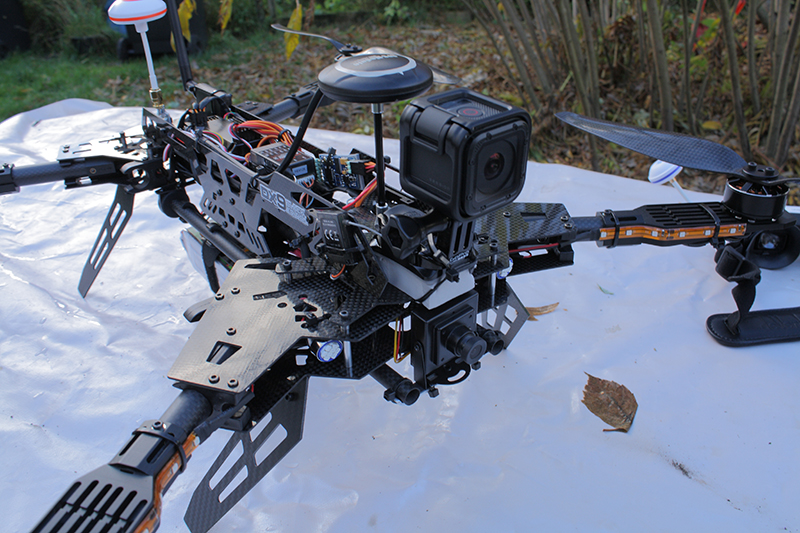 Walkera G-2D brushless Gimbal 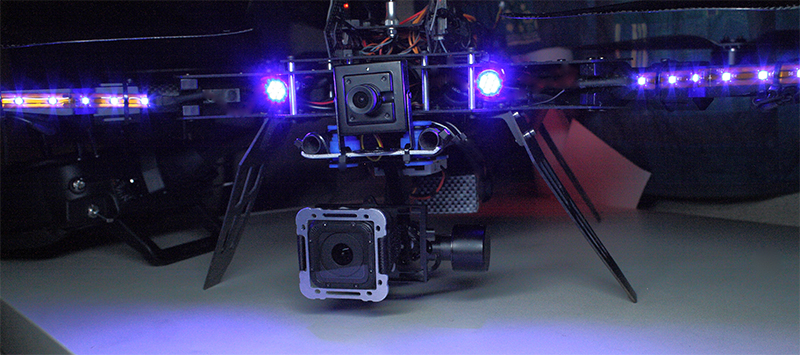 Gimbal : Ich habe mir das China Gimbal gekauft und das zickte nur rum, nachdem ich die Software geflasht hatte auf einmal Sensor Fehler. Hab es dann erst mal weg gelegt und mir das Walkera G-2D brushless Gimbal geordert , ran gebaut, Strom ran und läuft. Bei dem China Gimbal hab ich den Controller mit Sensor getauscht, Software rauf und jetzt läuft das Teil richtig gut.  -------------------------------------------------------------------------------- Hier mal ein Video, das ich bei Youtube entdeckt habe, HK Predator 650 Für die, die gerade neu anfangen habe ich hier mal ein paar Videos eingefügt. Perle 250er FPV-Pot Racer/Copter Selbstbau-Video! FPV für Einsteiger | 5.8GHz | Feelworld (HD) DEUTSCH  Acro Mode: Das ist der manuelle Flugmodus für fortgeschrittene Nutzer, vergleichbar mit dem fliegen eines Helis. Der Copter stabilisiert sich nicht nach einem Flugmanöver. Stabilize Mode: Im Stabilize Modus fliegt der Copter eigenstabil, er versucht nach jeder Stickeingabe sich wieder in der Horizontalen auszurichten. Dieser Modus ist für Anfänger und vor allem für FPV-Flieger geeignet. Giert man den Copter, wird er die entsprechende Ausrichtung beibehalten, sobald man den Stick loslässt. Alt Hold: Im Altitude Hold Modus versucht der Copter die Höhe zu halten. Hierbei kann die Höhe während des Fluges mit dem Throttle Stick variiert werden, indem man ihn, bezogen auf den Nullpunkt hoch oder runter schiebt. Der Nullpunkt wird beim aktivieren des Alt Hold Modus festgelegt. Schaltet man den Alt Hold Modus während des Fluges ein, so wird die gegenwärtige Position des Throttles sozusagen zur 0 Position für die Höhe festgelegt, von der ausgehend man höher oder tiefer fliegen kann. Beim Aktivieren des Alt Hold Modus hält der Copter eine konstante Höhe. Verlässt man den Alt Hold Modus während des Fluges, so sollte man auch darauf achten, dass die Position des Throttle Sticks bei ca. 50% liegt, da der Copter ansonsten schnell steigen oder sinken könnte. Man kann im Alt Hold Modus Starten und Landen. Um die Motoren abzustellen muss man erst in den Stable Mode umschalten. Loiter Mode: Im Loiter Mode wird der Copter versuchen, die gegenwärtige Position zu halten. Man kann den Copter weiterhin steuern, wobei nach einer Bewegung der Punkt, an dem man die Sticks loslässt zur neuen Loiter Position wird. Die Höhe kann ähnlich wie im Alt-Hold Modus variiert werden. Die Throttlestellung zum Zeitpunkt des Einschaltend des Loiter Modus wird sozusagen der Nullpunkt. Bewegt man den Throttle oberhalb dieses Nullpunktes, wird der Copter steigen, bewegt man den Throttle unterhalb, wird er sinken. Zu beachten ist daher, dass man den Loiter Mode erst einschaltet, wenn der Copter die Höhe hält. Ansonsten könnte beim zurückschalten in z.B. den Stabilize Modus der Copter stark steigen oder sinken. Mittlerweile kann man auch im Loiter Modus landen. Simple und Super Simple Mode: Diese Modes legt man sich am besten auf einen Dreifachschalter Normal - Simple - Super Simple. Sie können auch in Kombination mit anderen Modes benutzt werden.Der so genannte Simple Mode wird beim MK als “Care Free” bezeichnet. In diesem Modus wird der integrierte Kompass genutzt, um die Flugrichtung des Copters aus der Sicht des Piloten zu fixieren. Konkret bedeutet das, dass in diesem Modus vorne immer vorne aus der Pilotensicht ist. Giert um z.B. 45 Grad nach rechts und drückt Nick nach Vorne, so wird der Copter nicht nach rechts fliegen, sondern aus der Pilotensicht weiterhin nach vorne. Der Pilot darf sich im Simple Modus keinesfalls um seine Achse drehen. Dieser Modus ist für Multicopteranfänger interessant, aber Leute mit Flugerfahrung sollten diesen Modus nicht verwenden. Super Simple Mode: benutzt die Home Position als Referenz für die Vorwärts Richtung. Ein GPS Lock ist erforderlich. Wenn sich der Copter mehr als 10m von der Home Position entfernt, wird seine Orientierung ständig neu berechnet. Dadurch zeigt das Heck permanent zum Piloten. Auto Mode: Der Auto Mode ist einer der interessantesten des APMCopters. Hierbei fliegt der Copter im Autopilot Modus und führt einen im Mission Planer festgelegten Flug aus. Der Copter kann starten, Wegpunkte abfliegen, ein Foto auslösen oder eine beliebige Aktion zum Ereignis X ausführen. Der Autopilot Modus kann sowohl am Boden als auch in der Luft gestartet werden. Sollte man vom Boden aus in den Auto Modus wechseln, so wird dieser erst beginnen, wenn man den Copter armed und den Throttle nach vorne bewegt. Dies ist eine Sicherheitsvorkehrung, damit der Copter nicht automatisch startet, falls man am Boden aus Versehen den Schalter mit dem Auto Modus betätigt. Beim Autopiloten sollte man beachten, dass der Copter nachdem er alle Wegpunkte abgeflogen hat nicht automatisch zum Ausgangspunkt (Home) zurückkehrt. Er wird beim letzten Wegpunkt in den Loiter Modus gehen. Will man, dass der Copter nach Hause kommt, sollte man als letztes Kommando Return to Launch (RTL) programmieren. Das Land Kommando läßt den Copter anschließen sanft landen. Man kann im Automodus nicht manuell landen. Um selbst eine Landung vornehmen zu können, muss man den Automodus abschalten und in den Stabilize, Alt Hold oder Loiter Modus schalten. RTL Mode: RTL steht für Return to Launch, also zurückkehren zum Startpunkt. Der Startpunkt wird festgelegt wenn man den Copter armed, sobald dieser über GPS Fix verfügt (die blaue LED des APM 2.5 Boards leuchtet konstant).armed bedeutet: Starten der Motore indem man den Gasstick 5 Sekunden in die rechte untere Position schiebt.Die Höhe, in welcher der Copter zum Ausgangspunkt zurückkehrt kann man im Mission Planer einstellen. Stellt man RTL altitude im Mission Planer auf 0, hält der Copter seine aktuelle Höhe bei. Erreicht der APMCopter seinen Ausgangspunkt, wird er über diesem im Loiter Modus (GPS Hold + Alt Hold) hovern. Nach einer eingestellten Zeit wird der Copter eine automatische Landung initiieren. Um dies zu verhindern und eine manuelle Landung auszuführen, muss man in den Stabilize Modus umschalten. Immer daran denken, dass der Ausgangspunkt beim armen des Copters neu gesetzt wird. Steckt man also einen neuen Akku an und armed nachdem das Board einen GPS-Fix hat, ist der Ausgangspunkt neu gesetzt. Startet man den Copter ohne GPS-Fix, so kann es sein, dass dieser während des Fluges einen Fix erzielt und sich die Ausgangsposition somit irgendwo auf der Flugstrecke befindet. Also unbedingt auf die blaue LED achten! Guided Mode: Der Guided Mode funktioniert im Prinzip wie der RTL Mode mit dem Unterschied, dass der Ausgangspunkt festgelegt wird, indem man auf einen Punkt auf der Karte klickt. Dieser Modus ist vor allem für alle interessant, die ihr Notebook auf dem Flugfeld dabei haben. Erreicht der Copter seinen Ausgangspunkt, wird er über diesem hovern bis er ein neues Kommando erhält. Position Hold Mode: Der Position Hold Modus ist im Prinzip dasselbe wie Loiter Mode, aber die Höhe ist manuell steuerbar. OF_Loiter Mode: Hier wird die Position nur durch den Optical Flow Sensor, also ohne GPS gehalten. Circle Mode: Im Circle Modus umkreist der Copter einen bestimmten Punkt, wobei der vordere Ausleger immer auf das Zentrum des Kreises zeigt. Das Zentrum des Orbits wird der Punkt, an dem sich der APMcopter zum Zeitpunkt des Aktivierens des Circle Mode befindet. Im Circle Mode kann man nicht manuell landen oder die Motoren ausschalten. Der Radius wird in Meter im CIRCLE_RADIUS Parameter eingetragen. Steht dort 0 dreht sich der Copter nur um seine eigene Achse (ideal um Panoramas zu machen). Land Mode: landet den Copter. Er sinkt mit der Geschwindigkeit “WPNAV_SPEED_DN” auf eine Höhe von 10 m und schaltet dann auf “LAND_SPEED” (default 50cm/s). Wenn er den Boden erreicht, fährt er die Motore runter und schaltet sie ab, wenn der Pilot den Gasstück auf 0 hat.Der “Lande-Controller” versucht bei GPS Lock die horizontale Position zu halten, aber der Pilot kann sie mit den Sticks korrigieren. Follow Me Mode: Der Follow me Modus könnte im Deutschen als “Gassi gehen” Modus bezeichnet werden. Aktiviert man diesen Modus, wird der Copter dem Piloten folgen. Man braucht dazu: einen APMCopter mit Telemetrie ein Notebook (am besten mit GPS) oder ein USB GPS Dongle oder Bluetooth GPSoder ein Android Device mit der Andropilot App :)ein 3DR Radio Modul Um dem Piloten zu folgen, wird dessen aktuelle Position ständig an den Copter gesendet. Mit der Andropilot App kann man im Lead-it Mode den Copter durch Drehen des Körpers und neigen des Tablets zu steuern |
Rainer |
gedruckt am 10.07.2026 - 20:43 |
| http://www.dt-c-rallye-racing.de/include.php?path=content&contentid=44 |